Magazino GmbH
 More +
More +
From electronics software integration to leading the automated navigation team, I helped turning this large robot from a prototype to a product deployed in multiple warehouses.
Less -
Roboticist, Programmer, Software Architect with a passion for Planning and Mobile Robots
After getting my Master Degree in Robotics and Automation (2012) with
a background in computer
science (Bachelor, 2009), I worked for a B2B company developing
financial applications as cloud service
, with a focus on robustness and reliability of the software.
In 2016 I got my PhD in robotics, focused on
planning and control algorithms for humanoid and mobile robots.
In the teams I have worked with, I usually handle the complexity of the design
and management of the software architecture and API.
I like to take part in robotics competitions and to develop industrial applications,
because that's where the difference between a demo and a working product becomes evident.
Check the right menu for my contacts.
I have been learning advanced topics about robotics and planning, but my background remains computer engineering and software architecture.
Either in a large team or alone, playing with robots is always fun. This is a short list of projects I enjoyed since my first robot in 2009, a P3AT.
More +
From electronics software integration to leading the automated navigation team, I helped turning this large robot from a prototype to a product deployed in multiple warehouses.
Less -
 More +
More +
I had the pleasure to co-design and manage the development of the software running on the Walk-Man robot, during the DRC.
Less -
 More +
More +
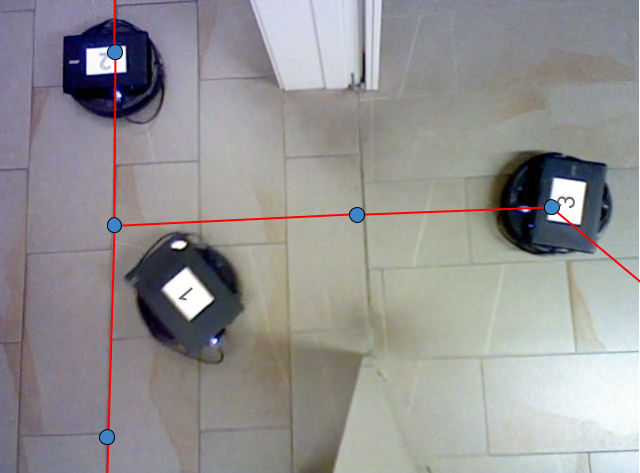
I have been working with coordination algorithms in a decentralized multi-robot environment.
Less -
I believe that exchange of information and speed management are the key points for energy efficient traffic management. A time-space planner can provide both collision avoidance and speed control, while avoiding abrupt stops and acceleration. I designed two versions of a time-space planner, respectively in a discrete or continuous environment.
The first algorithm is based on a modified graph representation of the space-time where the robotic vehicles operate. The proposed graph representation augments standard path planning strategies by allowing multiple speeds. Robots can make and exchange accurate predictions on their planned routes and speeds, so as to prevent and solve possible collisions. Indeed, the algorithm is formally proved to provide collision free paths.
In the second version, a sample based approach in a discrete state and continuous time space is used for the trajectory computation of a single robot. The procedure is thus extended, based on a local robot information exchange, to the computation of collision free trajectories of multi-robot systems.
 More +
More +
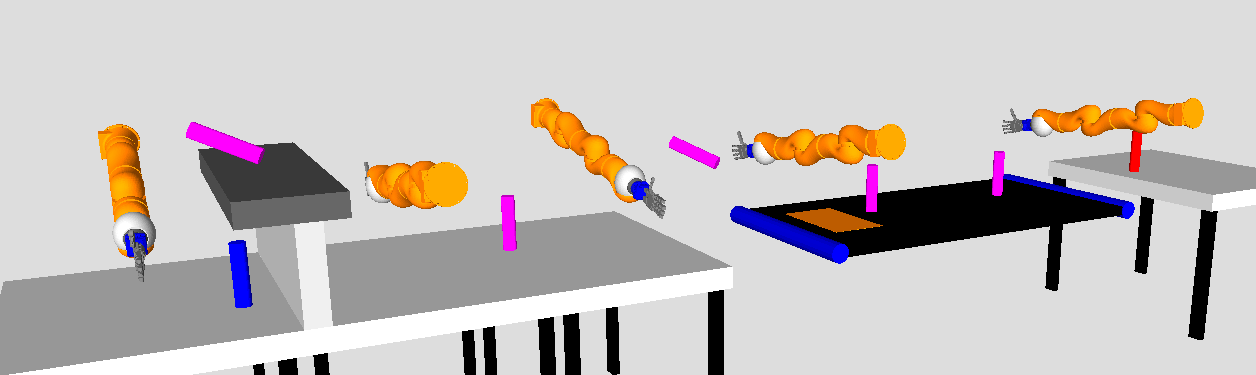
Planning for multiple arms and robots movements with a graph-based search considering their grasps and kinematics capabilities.
Less -
Moving objects with autonomous robots is a wide topic that includes single-arm pick-and-place tasks,
object regrasping, object passing between two or more arms in the air or using support surfaces such as
tables and similar. I developed a planning scheme which, based on the use of pre-defined elementary
manipulation skills, aims to unify solutions which are usually obtained by means of different planning
strategies rooted on hard-coded behaviors.
Both robotic manipulators and environment fixed support surfaces are treated as end-effectors
of movable and non-movable types, respectively. The task of the robot can thus be broken down
into elementary building blocks, which are end-effector manipulation skills, that are then
planned at the kinematic level. Feasibility is ensured by propagating unforeseen low-level
failures at the higher level and by synthesizing different behaviors.
Finally, a time varying graph is build in order to handle multiple objects in dynamic chains of robots.
 More +
More +
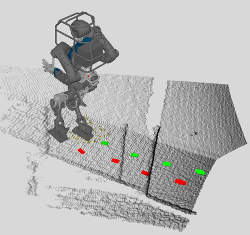
Online planner for footsteps of a humanoid robot walking on irregular terrain.
Less -
I developed an online planner that computes the necessary steps to be followed by a humanoid robot, with arbitrary kinematic structure, to reach a desired position based on the scene captured as a point cloud. The proposed method provides a sequence of feasible footsteps in terms of kinematic reachability and stability according to a desired direction of motion. The best footstep among all possible solutions resulting from the procedure is thus selected. The approach has been tested on the COMAN and Walk-Man humanoid robots in different scenarios including stairs and uneven terrains.
 More +
More +
My first experience with a robot (good old P3AT)! Laser and vision based reactive navigation that avoids obstacles and heads to a goal.
Less -
As a part of my bachelor thesis, I partecipated at the robotour2009 competition. My work was focused on a local planner based on a reactive set of behaviors, coordinated by time-varying weights depending on the perceived environment. A laser sensor and a webcam provided the necessary perception about road limits and obstacles.